System Architecture - Frontend
In this problem we review some of the concepts we have seen in previous sessions and follow on the impact that they have on the Front-End Components. You should have a look at the chapter written by Bruner first.
Related materials:
by Lasse Løvstakken (lasse.lovstakken@ntnu.no) and Alfonso Rodriguez-Molares (alfonso.r.molaes@ntnu.no) 10.11.2016
Contents
Tasks of the Front End
- What functions are done in the Front End?
% Transmit: Pulse generator and amplifier, transmit delay generator, pulse trigger, multiplexer (optional) % Receive: Protection circuit, low-noise amplifier, depth-dependent amplifier, anti-aliasing filter, analog-to-digital converter, beamformer including receive delay generation and apodization, multiplexer (optional)
- Synchronization is fundamental for ultrasound imaging. Make a list of different issues when it comes to synchronization.
% Tx pulse trigger is the reference for the receive line. Receive is % started a certain time after tx trig. Range gating is done assuming a % fixed speed of sound, c=1540m/s. Pulses are fired at a given pulse % repetition frequency (PRF) determined by the image depth (pulse-echo). % There is also a frame trigger pulse which indicates the start of a new % sequence of pulses. Timing is especially important in Doppler processing, % where the phase information at the center frequency is used to estimate % motion. The PRF must be constant.
Data transfer
Assume that we want to make 2D tissue imaging with a phased array. The system has 128 channels, the signals are digitized (A/D-converted) with 12 bits resolution with a sample rate of 40 MSamples/s. Assume we utilize all available channels and that all data is transferred to a digital processing unit.
- What is the datarate into such processing unit?
channels= 128; % channels Fs=40e6; % sampling frequency [Hz] resolution=12; % sample resolution [bit] datarate = channels*Fs*resolution; % datarate [bps] disp(sprintf('The needed datarate is %0.2f GB/s',datarate/1024^3/8));
The needed datarate is 7.15 GB/s
Number of beams
We use a 90° opening angle, and a transmit focus depth of 70 mm. The probe aperture is 20 mm. The probe central frequency is 3 MHz. Assume the beam width  can be approximated by
can be approximated by  (i.e. two times the wavenumber times the F-number). The beam overlap is then defined as:
(i.e. two times the wavenumber times the F-number). The beam overlap is then defined as:

A 50% beam overlap is used at focal depth. The medium speed of sound is 1540 m/s, as usual.
- Compute the minimum number of beams needed to cover the desired field-of-view
f=3e6; % central frequency [Hz] c0=1540; % speed of sound [m/s] lambda=c0/f; % wavenumber [m] focal_depth=70e-3; % focal depth [m] aperture=20e-3; % probe aperture [m] pitch=aperture/channels; % pitch F=focal_depth/aperture; % F-number BW=2*lambda*F; % beam width [m] beam_overlap=0.5; % beam overlap [] dx=BW*(1-beam_overlap); % distance between adjacent beams at the focal depth [m] dtheta=atan(dx/focal_depth);% angle between adjacent beams N_beams=ceil(pi/2/dtheta); % number of beams disp(sprintf('We need %d beams',N_beams));
We need 62 beams
Expanding aperture
We will use expanding aperture and we are considering to make 3 different modes available for the user with F-numbers 1.5, 3.5 and 7.
- Compute the maximum depth we can attain while keeping those F-numbers
F_number=[1.5 3.5 7.5]; % possible F-numbers z_max=F_number*aperture; % corresponding maximum depths [m] disp(sprintf('The maximum depth for F=[%0.1f, %0.1f, %0.1f] is z_max=F=[%0.0f, %0.0f, %0.0f] mm',F_number,z_max*1e3));
The maximum depth for F=[1.5, 3.5, 7.5] is z_max=F=[30, 70, 150] mm
- Defining the lateral resolution as half the beam width (BM), compute the lateral resolution (before the maximum depth) for each of these modes
BW=2*F_number*lambda; % beam width [m] lateral_resolution=BW/2; % lateral resolution [m] disp(sprintf('The lateral resolution is [%0.1f, %0.1f, %0.1f] mm',lateral_resolution*1e3));
The lateral resolution is [0.8, 1.8, 3.8] mm
- For each respective mode, after the maximum depth, Will the F-number be higher or lower?
- And hence, will then the resolution be higher of lower?
- For each mode compute the axial resolution at 30 mm
zc=30e-3; aperture_at=min([zc./F_number; aperture*ones(1,3)]); % aperture [m] F_number_at=zc./aperture_at; % F-number BW_at=2*F_number_at*lambda; % beam width [m] lateral_resolution_at=BW_at/2; % lateral resolution [m] disp(sprintf('The lateral resolution at %0.0f mm is [%0.1f, %0.1f, %0.1f] mm',zc*1e3,lateral_resolution_at*1e3));
The lateral resolution at 30 mm is [0.8, 1.8, 3.8] mm
- For each mode compute the axial resolution at 100 mm
zc=100e-3; aperture_at=min([zc./F_number; aperture*ones(1,3)]); % aperture [m] F_number_at=zc./aperture_at; % F-number BW_at=2*F_number_at*lambda; % beam width [m] lateral_resolution_at=BW_at/2; % lateral resolution [m] disp(sprintf('The lateral resolution at %0.0f mm is [%0.1f, %0.1f, %0.1f] mm',zc*1e3,lateral_resolution_at*1e3));
The lateral resolution at 100 mm is [2.6, 2.6, 3.8] mm
- For each mode compute the axial resolution at 150 mm
zc=150e-3; aperture_at=min([zc./F_number; aperture*ones(1,3)]); % aperture [m] F_number_at=zc./aperture_at; % F-number BW_at=2*F_number_at*lambda; % beam width [m] lateral_resolution_at=BW_at/2; % lateral resolution [m] disp(sprintf('The lateral resolution at 150 mm is [%0.1f, %0.1f, %0.1f] mm',lateral_resolution_at*1e3));
The lateral resolution at 150 mm is [3.8, 3.8, 3.8] mm
Size of beamforming filters
We implement the receive beamforming delays with FIR-filters, after A/D conversion. To achieve greater the signal is upsampled 4 times before the delay step.
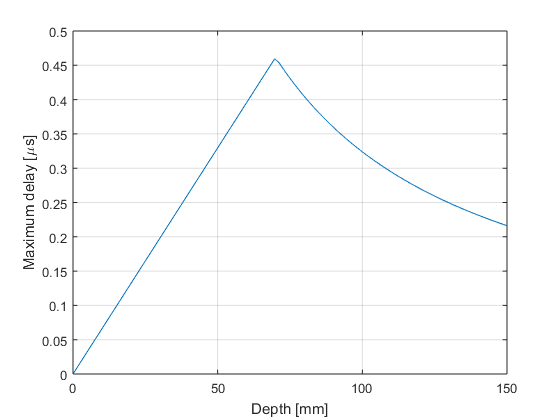
- Using expanding aperture and a F-number of 3.5, What would be the minimum length (in samples) of these FIR filters? For simplicity, consider the case without steering (x=0).
% For the non steering case the maximum delay will be given by the % difference between the length of the path from the edge of the aperture (E) to the focal % point (F), and the length of the path from the origin (O) and the focal % point. % % delay=(dist(E,F)-dist(O,F))/c0; % % where E = [z/F/2, 0] % F = [0, z] % O = [0, 0] % % Inserting those points into the equation we get: % % delay=(sqrt(z^2+(z/(2F))^2)-z)/c0 % % however z/(2F) cannot be larger than A/2 % we represent the maximum delay against depth up to 15 cm z=linspace(0,150e-3,100); % depth vector [m] xe=min([z/2/F ; aperture/2*ones(1,100)]); % expanding aperture semiwidth [m] F=3.5; % F-number delay=(sqrt(z.^2+(xe).^2)-z)/c0; % delay [s] figure; plot(z*1e3,delay*1e6); hold on; grid on; ylabel('Maximum delay [\mus]'); xlabel('Depth [mm]');
% Therefore the maximum delay will be at z=F*aperture max_delay=aperture/c0*(sqrt(F^2+1/4)-F); figure; plot(z*1e3,delay*1e6); hold on; grid on; plot(F*aperture*1e3,max_delay*1e6,'ro'); ylabel('Maximum delay [\mus]'); xlabel('Depth [mm]');
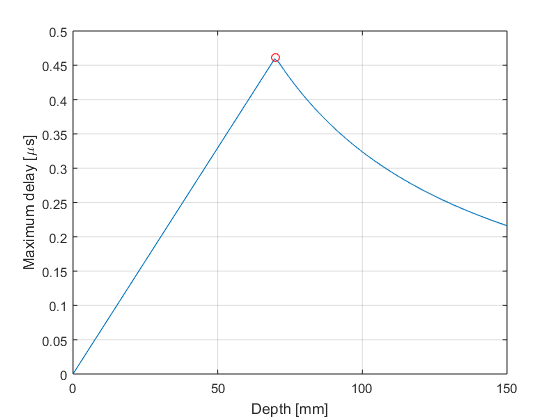
% The number of samples is therefore upsampling=4; max_samples=ceil(upsampling*max_delay*Fs); % samples disp(sprintf('We need %d samples',max_samples));
We need 74 samples